Abstract
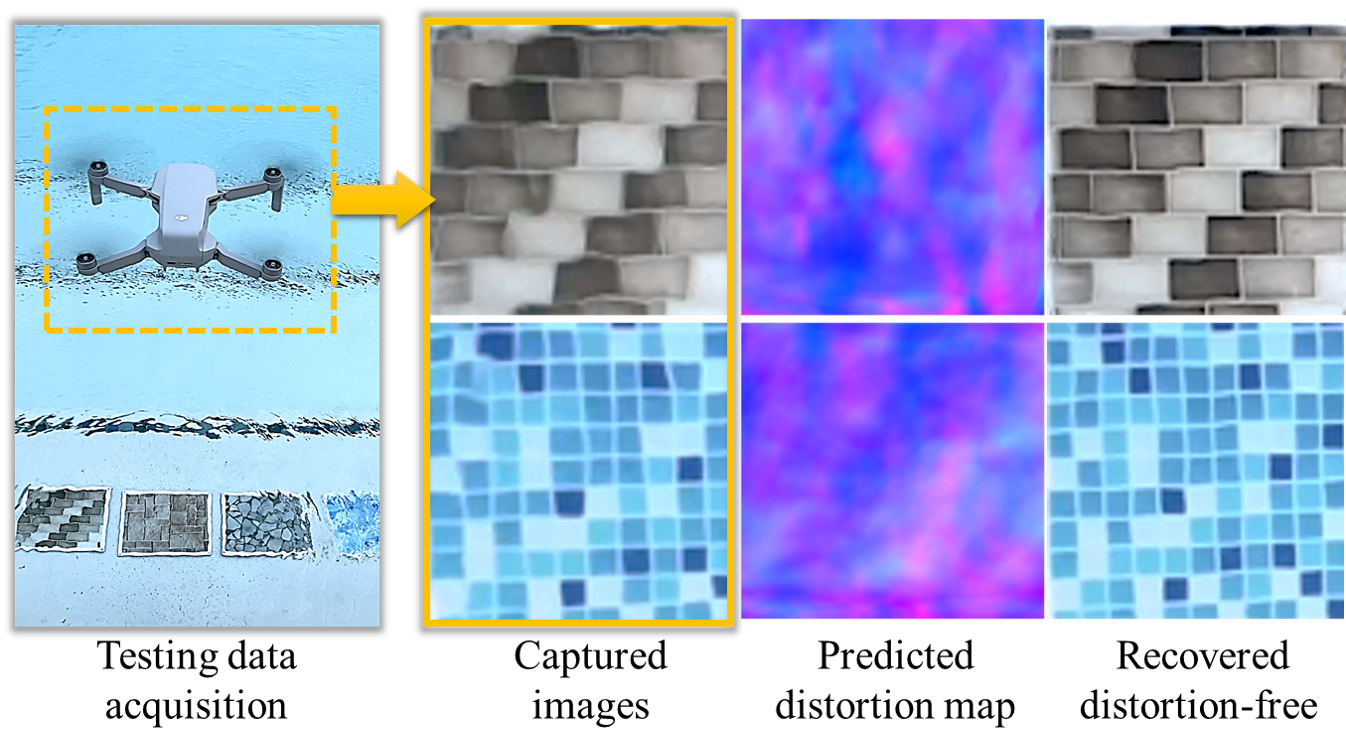
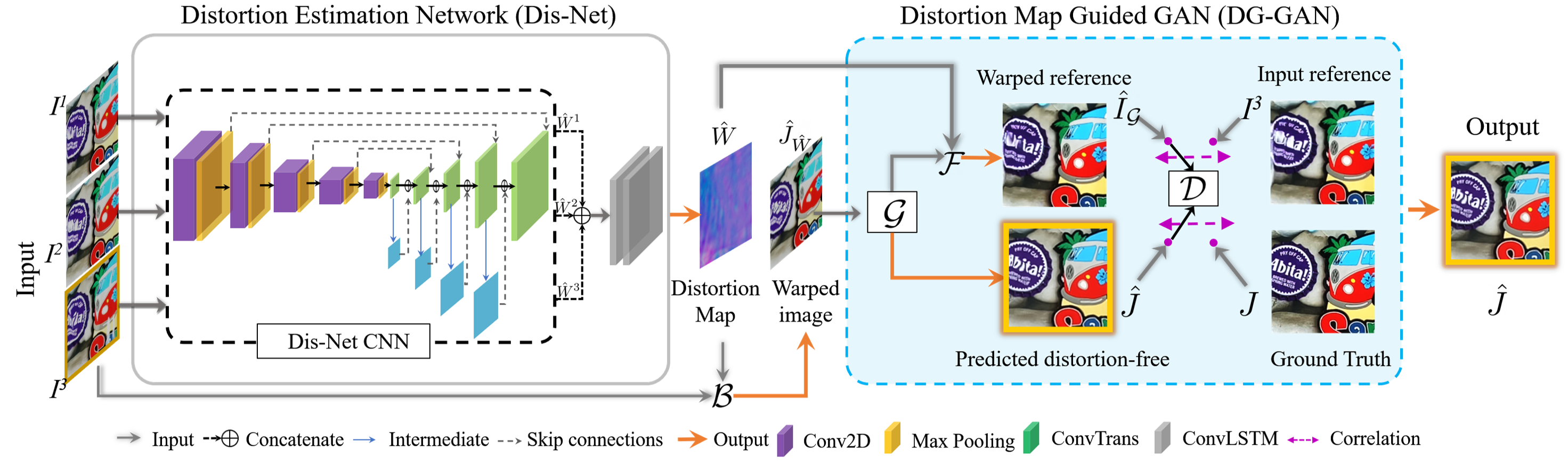
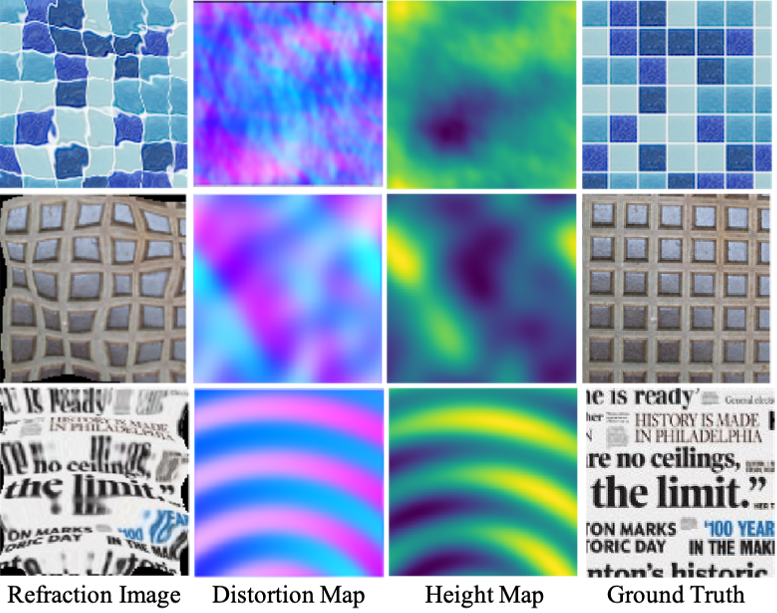
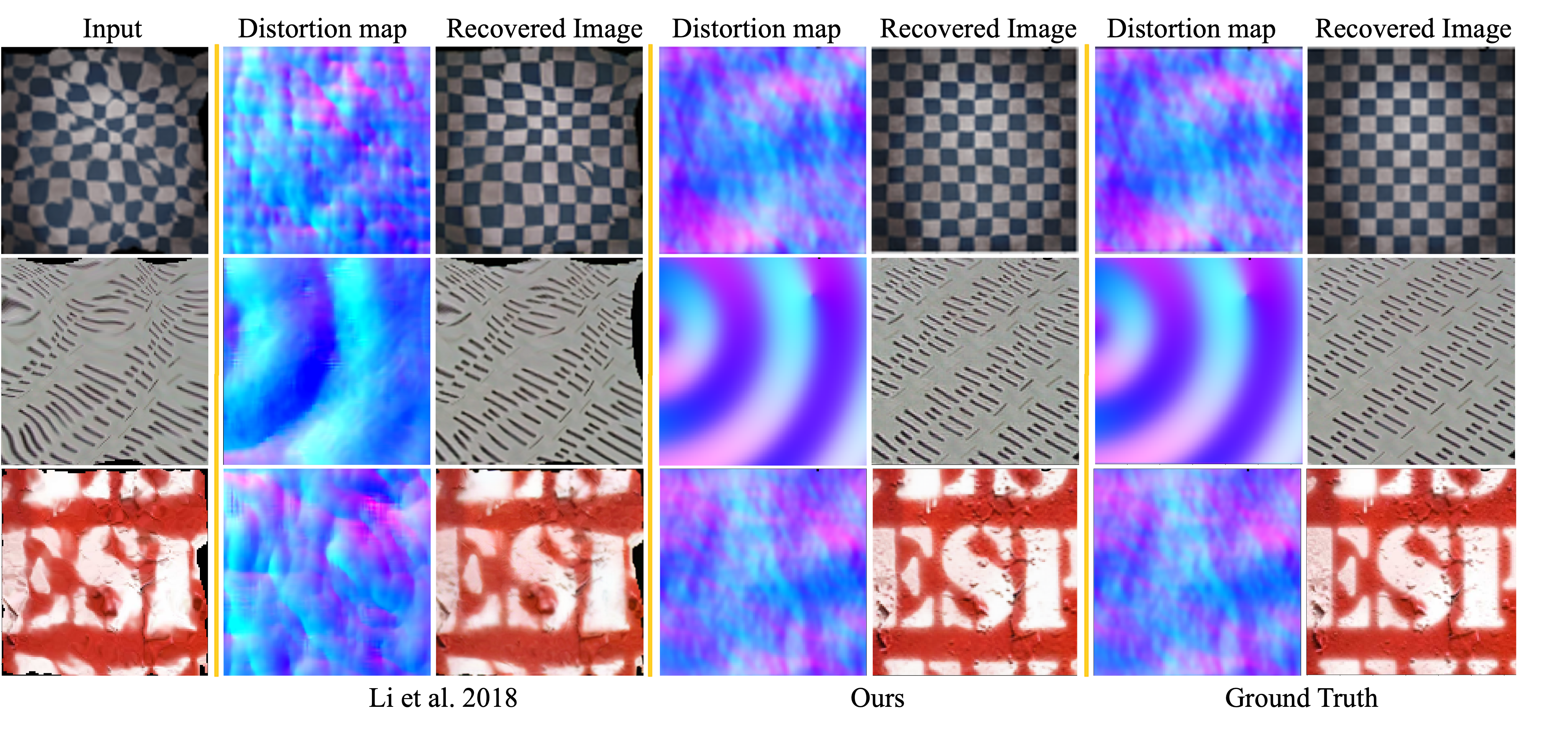
The fluctuation of the water surface causes refractive distortions that severely downgrade the image of an underwater scene. Here, we present the distortion-guided network (DG-Net) for restoring distortion-free underwater images. The key idea is to use a distortion map to guide network training. The distortion map models the pixel displacement caused by water refraction. We first use a physically constrained convolutional network to estimate the distortion map from the refracted image. We then use a generative adversarial network guided by the distortion map to restore the sharp distortion-free image. Since the distortion map indicates correspondences between the distorted image and the distortion-free one, it guides the network to make better predictions. We evaluate our network on several real and synthetic underwater image datasets and show that it out-performs the state-of-the-art algorithms, especially in presence of large distortions. We also show results of complex scenarios, including outdoor swimming pool images captured by drone and indoor aquarium images taken by cellphone camera.